VR和AR經過多年發展,現今也算小有所成,給很多人帶來了全新的體驗。然而,對比那些科幻電影,總覺得它們還差很多東西。沒錯,電影里那些炫酷的虛擬世界場景,都需要一個不可或缺但門檻又非常高的技術來支撐,那就是位置追蹤。這個問題不解決,VR、AR就永遠只能是一種宅男科技。

《頭號玩家》電影相信很多人都看過,片中的場景應該算是VR的終極形態了。但是要達成這樣的體驗,必須要解決一個問題:如何定位玩家的空間位置?也就是所謂的位置追蹤怎么實現。對于AR而言,這個問題還不算很尖銳,因為它是基于現實世界的圖像增強。但全沉浸式的VR就不同了,玩家看不到周圍的真實環境,展現在玩家周圍的完全是個虛擬世界,這個虛擬世界又必須把真實環境里的各種障礙以及玩家的空間位置準確反映出來,才能讓人暢玩。
定位空間位置這個概念很好理解。但為了接下來便于闡述各種定位技術,我們還是要從學術的角度來說明一下。我們生活在三維世界中,稍微學過幾何的人都知道一旦確定了任何物體的X、Y、Z坐標,就能準確知道它的位置。VR行業將這種定位坐標稱為Dof(自由度,Degree Of Freedom),由3個坐標描述的位置信息即3Dof。但是,這樣只能定位到一個體積忽略不計的“點”,而現實世界任何物體都有體積,僅靠3Dof描述三維空間物體的位置是遠遠不夠的,于是便有了“位姿”。
是的我沒有打錯字,位姿是指物體在三維空間里的位置和旋轉量。位姿需要6Dof來描述,通俗地講就是在3Dof的基礎上,加入三個角度參數,也就是讓物體還能繞三個軸轉動,構成六軸定位。很多人第一次聽到這個詞,應該都是因為Wii和PS3的手柄。在虛擬世界中,只有6Dof才能準確定位物體。

▲由3Dof和6Dof描述的角色動作,6Dof的定位更加準確。
電影和游戲制作中經常用到動作捕捉技術,其實就是在追蹤貼在人體關節上的標記點的6Dof。多個標記點根據人體動作規律連接起來就能模擬出人的動作。實際應用中一般只能捕捉較大關節的位置信息。要想精準捕捉每塊骨骼、每塊肌肉的位置是很難的。有了動作捕捉,才能在虛擬世界中呈現人物的準確形態。

▲動作捕捉在電影和游戲制作中都是關鍵技術,今后有望在AR/VR中扮演同樣角色。
目前,位置追蹤技術主要有兩大門派:依靠各種外部設備來定位的“外向內追蹤技術”(Outside-inTracking),和不需要任何外部設備的 “內向外追蹤技術”(Inside-outTracking)。
外向內追蹤技術
外向內追蹤技術是當前相對比較成熟的主流技術,它的實現方法也有很多:光學追蹤、電磁追蹤、慣性追蹤、超寬帶(Ultra Wide-Band,UWB)追蹤等等。這其中,光學追蹤是比較常見的方案。光學追蹤需要一個標記點和負責捕捉這個標記點的相機,這其中根據相機和標記點的數量、相機曝光方式、標記點是否有源等,又分成了好幾個流派。PS MOVE用的是單相機單標記點;PS VR、Oculus、HTC Vive是多相機多標記點。
單標記點方案只能捕捉3Dof信息,因為對于一個點而言,它怎么旋轉都還是一個點。多標記點方案才能記錄到6Dof位姿信息。
以Oculus Rift為例,它利用多個紅外LED作為標記點,通過兩臺已校準空間位置的紅外相機實時拍攝獲取標記點方向,再通過PnP算法,即利用四個不共面的紅外LED的位置信息、四個點獲得的圖像信息計算出設備在紅外相機坐標系里的位置,進一步擬合出設備的三維模型,最終得到玩家的位置和方向。

▲設置Oculus Rift紅外相機的位置參數是很重要的。
HTC Vive采用了激光掃描方案。它有兩個Steam激光發射器,分別在水平和垂直方向上以每秒6次的頻率發射激光掃描定位空間。頭戴顯示器和手柄上有數十個光敏傳感器,設備通過測量傳感器接收到激光的時間差來計算傳感器相對于激光發射器的位置。有多個傳感器的位置就能擬合出設備的位置和方向。相對于紅外定位技術而言,激光掃描定位具有成本低、定位精度高、可分布式處理等優勢,且幾乎沒有延遲,不怕遮擋和干擾。

▲HTC Vive的“Lighthouse”,由兩個steam激光發射器進行定位。
當然上面的話說起來簡單,但實際上不論Oculus Rift還是HTC Vive,它們的定位計算過程都十分復雜,對于圖像處理設備的要求也很高。但橫向比較的話,激光掃描定位效果要優于紅外追蹤定位,運算量也相對較少一點。
現在我們可以看到,上面提到的這些定位方式有著很大的局限性:必須校準相機空間位置,意味著換個環境就得重新調試;必須通過線纜連接外部主機(即圖像處理設備),意味著使用者不能做很大的動作;必須在相機拍攝范圍內活動,這一點最不能讓人容忍。除非腳下有一個萬向傳送帶之類的玩意兒,能保證使用者無論往任何方向奔跑,在現實世界中都不會離開原地,就像跑步機那樣。然而現實中并沒有這樣的東西。
所以需要在定位技術上做文章。這就得聊聊微軟的黑科技HoloLens了。
內向外追蹤技術
HoloLens是一款頭戴式AR顯示設備,它的價格和技術都讓業界驚嘆。技術層面上,它采用了不需要任何外界傳感器的“內向外追蹤技術”。既然不需要外界傳感器,就不需要外部硬件搭建、標記,也不受傳感器監測范圍限制,也就有了更多樣的移動性和更高的自由度。
內向外追蹤也是一種光學追蹤方案。在頭戴設備上安裝攝像頭,讓設備自己檢測外部環境變化,經過視覺算法計算出攝像頭的空間位置。HoloLens有一個深度攝像頭,一個200萬像素的圖像攝像頭,以及4個環境感知攝像頭。它通過采集環境中的特征點,利用SLAM(即時定位與地圖構建)算法獲得空間位置信息。

▲HoloLens的玻璃罩子下集成了現今比較前沿的定位技術。
所謂SLAM算法,是通過傳感器獲取環境信息,包括視覺信息、深度信息、自身加速度、角速度等來確定自己的位置,并完成環境地圖的構建。SLAM有幾個很典型的應用場景:一是電影《普羅米修斯》中的探測球,自動飛行自動掃描,分分鐘建立環境的3D地圖并且還能全息呈現出來。現實的科技當然達不到這一步,但谷歌、蘋果等的無人車、米家掃地機器人等,都是通過SLAM算法進行實時環境分析的。谷歌的ProjectTango項目,也是利用該算法,讓手機實時繪制周圍環境的3D模型。可以說,SLAM是內向外追蹤的核心內容。

▲電影《普羅米修斯》中的環境探測球,算是SLAM的頂級表現了。
同樣地,內向外追蹤也有多相機和單相機的方案,它們各有千秋。多相機方案通過多個攝像頭采集外部空間的特征點,通過三角定位計算出特征點的空間數據。優點在于場景兼容性強,不需要太多的特征點就能定位。缺點就是圖像處理運算量非常大而且成本很高,HoloLens內置的處理芯片成本就高達數百美元。
單相機方案利用攝像頭與外部的環境的任意兩個特征點形成三角定位,繼而計算出空間位置。優點在于圖像處理計算量較小,成本也較低,但需要在環境中標記大量的特征點,占用太多空間。意味著該方案需要足夠的空間來采集特征點,才能實現定位功能。
采集特征點只是其中一個方面。其實HoloLens所實現的效果是一個非常復雜的工程。它相當于將Oculus、Kinect全部集成到用戶腦袋上。除了SLAM之外,還需要實時的3D繪制能力。實時3D在今天的游戲中早已不叫事兒,但要讓一款移動設備能畫出以假亂真的3D背景也并不容易。當然,在英偉達、英特爾等的推動下,雙攝像頭實時渲染已經很成熟了。
顯而易見,這類內向外追蹤設備面臨的挑戰也很大。首先,沒有外部圖像計算設備的輔助,對于頭戴設備的計算能力要求就更高。持續不斷地SLAM再進行3D合成虛擬空間的計算量十分龐大,并且非常耗電。HoloLens基于AR而不是VR,呈現的虛擬物品也并不復雜,3D計算量頓時少了幾個數量級,所以產品整體的電量主要耗在SLAM上。
官方宣稱的續航時間為2.5~5.5小時,其實已經超出我們的預期,原本以為這些酷炫的功能能撐一兩個小時就不錯了。但HoloLens的效果并非終點,當需要呈現全3D虛擬空間的時候,電池將會是一大軟肋,今后可能需要考慮推出背包式電池才能解決。
其次,開放環境、暗光環境、光滑表面的識別問題,由于沒有實體產品測試,不好做出結論。但結合Kinect的表現,可以猜測這一點并不會解決得很完美。
誰家的孩子有前途
目前,除了微軟之外,Oculus、Google,以及國內一些實力廠家都在布局內向外追蹤技術。Oculus公布了正在開發的VR一體機產品Santa Cruz,Google則推出了Tango系統,能讓手機通過攝像頭實時生成周圍環境的3D模型。
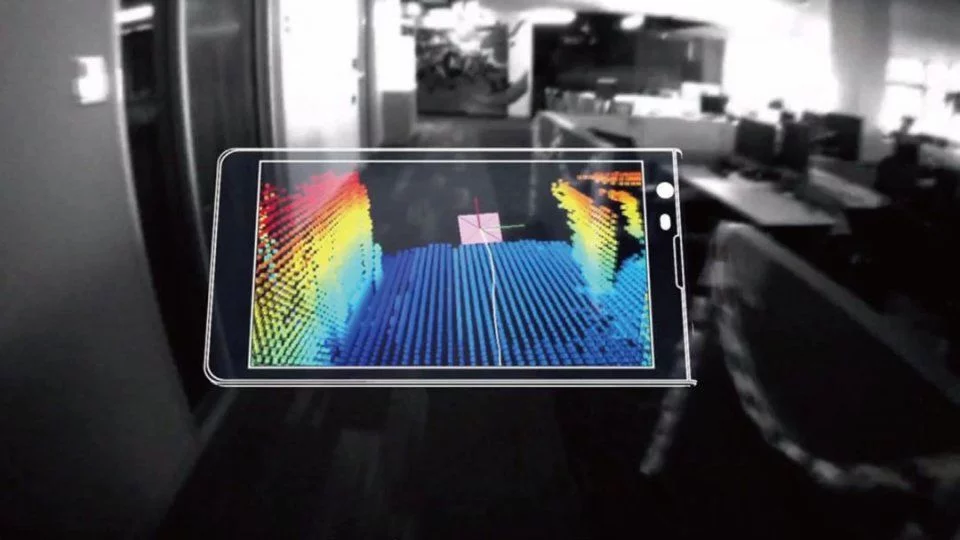
▲Tango系統演示,“雖然目前可能沒什么用但看起來很厲害的樣子”。
我們以前曾經說過,AR/VR一體機才是這類硬件的最終形態,而能將一體機和內向外追蹤技術結合起來,才能做出AR/VR的終極體驗。內向外追蹤技術是一場革命。“外向內”到“內向外”的進化,如同互聯網從PC端到移動端的變革,讓人擺脫了空間上的限制。只有能實現最自然的人體動作,才是最好的人機交互。
 ▲樂高推出的LEGO AR,不用買玩具也能嘗試。
▲樂高推出的LEGO AR,不用買玩具也能嘗試。
AR絕不是只限于玩玩《Pokémon Go》。試想一下,醫院做手術時,醫生能看到實時顯示出來的病灶情況;設計師在設計建筑時,能實時檢查建筑的內外結構;甚至孩子們可以通過AR玩遍全世界的玩具……這樣的前景,想想就讓人期待。

▲這樣來設計建筑應該是每個建筑設計師都夢寐以求的。
而VR的終極體驗,就是電影《頭號玩家》里的“綠洲”。當然電影里還有一個體感衣的設定,但那不是我們這次要講的東西,在電影里我們也能看到本文所講的這些定位方式。主角韋德和IOI的雜兵用的是外向內追蹤技術,觀眾能看到他們后面還有定位設備;而路人甲乙丙丁用的是外向內追蹤技術,觀眾能看到他們不受限制地自由奔跑。

▲電影《阿凡達》里,全息投影+觸控這樣的操作過于科幻了,但如果基于頭戴式AR,實現起來難度就小多了。
寫到這里,我突然感覺到不寒而栗。《頭號玩家》電影中所描繪的情節絕不是聳人聽聞的,一個完美的虛擬世界恐怕將會成為人類的精神鴉片。但是,就算是虛擬世界的王者,也是需要吃喝拉撒的,而這些是無法在虛擬世界完成的。畢竟,現實才是生存的基礎,而現實也有很多的美好。